|
|
|||||||
|
Gustavo Muñoz website |
|
Size:
60 ko
Platform: Mac/PC |
|
infos: |
| Besturen van een vinger |
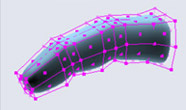
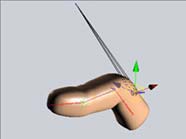
Ons doel is om alle mogelijke vinger-bewegingen te besturen met slechts één enkele bone. Het vereenvoudigen van alle animatie controls is zeer belangrijk om een goeie animatie in weinig tijd te realiseren. Voor ons vingermodel gebruiken we een ruwe UberNurbs vorm.

Eerst bouwen we een ketting van drie bones, die we gebruiken om de mesh te deformeren. Deze "geometry bones" (F1, F2, F3) moeten we centreren en op de juiste plek positioneren over de lengte van de vinger. Nadat ze geparkeerd zijn, verbind je het model aan de ketting. Nu bouwen we een systeem dat deze eerste vertakking aanstuurt. In feite gebruiken we dat nieuwe systeem om te gaan animeren.


Laten we eens een eerste bone toevoegen en gebruik parenting om het een "child" te maken van F1. Noem deze "F2rot". Hij moet beginnen bij de F2 "origin" en zich uitstrekken over de Z-as. Vervolgens voegen we een IK handle toe (die alleen dient voor F2). Maak deze IK handle een "child" van F2rot. We gebruiken dit soort elementen om uiteindelijk - met behulp van enkele constraints - de bones aan de controller te plakken. Voeg nu een nieuwe bone toe, die ongeveer de lengte van de hele vinger heeft.
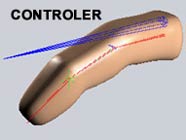
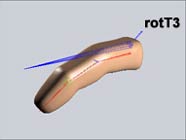
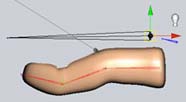
| Deze lange bone zal onze "CONTROLLER" worden. Hij heeft dezelfde orientatie als F1 en behoort net iets boven hem geplaatst te worden. Onze laatste bone is tevens van bemiddelende aard. We zullen hem "rotT3" noemen. Qua orientatie hoort hij in dezelfde richting als F3 te staan, wijzend naar de CONTROLLER origin. Hier zien jullie de complete hierarchie -------> | 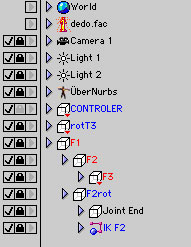 |
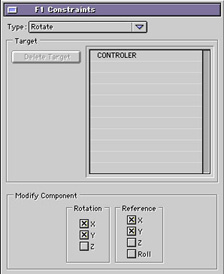
| We beginnen met de constraints voor F1 begin met het toekennen van een rotatie (Type :Rotate). Gebruik CONTROLLER als target. Let goed op dat je onderaan dit window bij "rotation" de Z-as uitschakelt. Voor "reference" horen zowel "Z" als "Roll" uit te staan :
Op deze manier orienteren we de vinger net als de CONTROLLER, maar alleen in de X en Y-as. De Z orientatie blijft beschikbaar voor andere dingen. |
 |
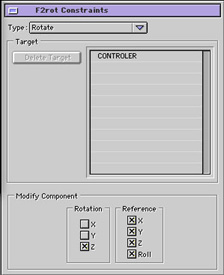
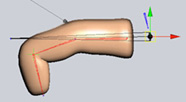
| F2 zal indirect worden aangestuurd, want zijn IK-handle is een "child" van F2rot. Op die manier erft hij tevens diens rotatie. Voor F2rot moeten we wel nog een constraint aanbrengen. (Type : Rotate) Gebruik de CONTROLLER als target. Dit keer laten we bij "Rotation" (onderaan) alleen de Z rotatie aan staan ---------> |
 |
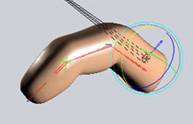
Zoals je ziet gebruiken we de Z rotatie van de controller om het tweede vingerkootje te buigen :
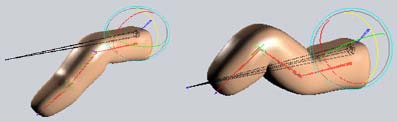
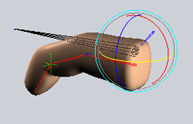
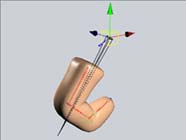
Het buigen van het laatste vingerkootje wordt aangestuurd door de translatie van de CONTROLLER. Dat is precies de reden waarom we "rotT3" daar geplaatst hebben. Die krijgt namelijk een "Autolook" constraint, terwijl de Z-rotatie onderaan dat window uitgeschakeld is.
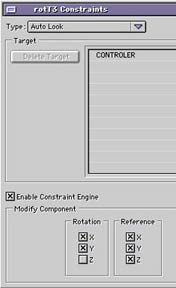 |
Dan voegen we een rotatie Constraint toe aan F3, met "rotT3" als target. In het window staan alleen beide X-waarden gemarkeerd. |  |
Dit stelt ons in staat om het laatste vingerkootje te besturen, enkel en alleen door onze enige controller te bewegen.
We hebben nu een zeer eenvoudig besturings-systeem. Met één enkele bone, kunnen we nu het model in alle standen besturen. Probeer het zelf eens uit en laat me weten wat je ervan vind.
Door te spelen met slechts de rotatie en translatie van die enkele controller, kun je bijna elke mogelijke pose van een menselijke vinger tot stand brengen.
De enige tekortkoming die ik in mijn systeem zie, is een gebrekkige besturing van het eerste vingerkootje. Met name de grip over de Z-orientatie. Het is soms moeilijk om een bepaalde onnatuurlijke stand te bewerkstelligen, die af en toe nodig is bijvoorbeeld bij het maken van een vuist. Ik denk echter dat dit tot op zekere hoogte op te vangen is door een goeie modellering van de hand. Helaas moet ik je bekennen dat ik in meerdere gevallen toch problemen had. Ik mis de optie om aan één bone meerdere rotatie constraints toe te kennen. Wie een goeie oplossing vindt voor dit probleem - met de voorwaarde dat je toch maar één enkele besturings bone gebruikt - laat me alsjeblieft weten hoe je dat voor mekaar hebt gekregen.
Bij voorbaat hartelijk dank en vriendelijke groet,
Gustavo Muñoz
 |
|
|